Rozdiel medzi GPS a DGPS

Obsah
GPS a DGPS sú satelitné navigačné systémy. Základný rozdiel medzi GPS a DGPS spočíva v ich presnosti, DGPS je presnejší ako GPS. DGPS bol navrhnutý zámerne na zníženie degradácie signálu.
GPS poskytuje presnosť asi 10 metrov, ale DGPS dokáže poskytnúť presnosť asi 1 meter, dokonca aj nad 10 cm.
- Porovnávacia tabuľka
- definícia
- Kľúčové rozdiely
- záver
Porovnávacia tabuľka
| Základ pre porovnanie | GPS | DGPS |
|---|---|---|
| Počet použitých prijímačov | Iba jeden, t.j. samostatný prijímač GPS | Dva prijímače Rover a stacionárne prijímače |
| presnosť | 15 - 10 m | 10 cm |
| Rozsah nástrojov | globálnej | Miestne (do 100 km) |
| náklady | Dostupné v porovnaní s DGPS | drahý |
| Frekvenčný rozsah | 1,1 - 1,5 GHz | Líši sa podľa agentúry |
| Faktory ovplyvňujúce presnosť | Selektívna dostupnosť, satelitné načasovanie, atmosférické podmienky, ionosféra, troposféra a viaccestný. | Vzdialenosť medzi vysielačom a roverom, ionosférou, troposférou a multipathom. |
| Použitý súradnicový systém času | WGS84 | Miestny súradnicový systém |
Definícia GPS
Globálny pozičný systém (GPS) poskytuje presnú polohu objektu na Zemi. Využíva včasné signály generované satelitmi otáčajúcimi sa okolo Zeme. GPS obsahuje konšteláciu 24 satelitov a navyše na zálohovanie. Na získanie presnej polohy sa používajú štyri satelity, tento proces sa nazýva trilaterácia.
Technológia GPS používa samostatné prijímače, kde sa poloha priamo vypočíta. Táto technika je náchylná na chyby, ako sú neopravené chyby družicových hodín, orbitálne chyby družicových parametrov, ionosférické a troposférické oneskorenia, viaccestné chyby, geometrické chyby a chyby výberu dátumu. Na zníženie týchto chýb sa vyvíjajú nové technológie. GPS môže získať nominálnu presnosť 10-15 metrov.
Vymedzenie pojmu
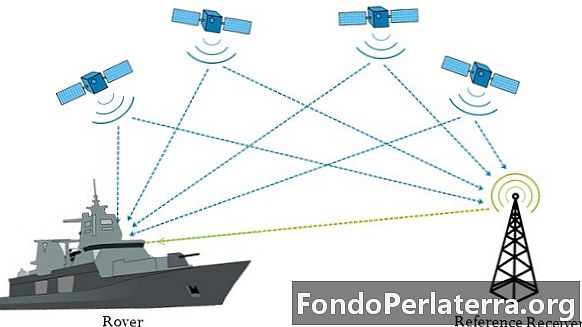
Diferenciálny globálny pozičný systém (DGPS) predstavuje zlepšenie systému GPS. Technológia DGPS môže dosiahnuť presnosť až 10 cm. Znižuje alebo eliminuje degradáciu signálu, čo vedie k zlepšeniu presnosti. Cieľom diferenciálnej GPS nie je ísť priamo na dané miesto; skôr nájde polohu vzhľadom na pevný referenčný bod. DGPS sa spolieha na dva prijímače, rover a referenčný prijímač, rover je užívateľ a referenčný prijímač je známy aj ako stacionárny prijímač.
Stacionárny prijímač je pevný a jeho poloha je známa systému. Satelitné informácie sú nepretržite vysielané smerom k roveru a veži základňovej stanice. Veža základňovej stanice používa svoju známu polohu na výpočet presného načasovania. Stacionárny prijímač je informácia pre roverový prijímač na úpravu meraní pomocou relatívnej polohy stacionárneho prijímača.
- V GPS je samostatný prijímač, ktorý prijíma signály zo satelitu, zatiaľ čo v DGPS existujú dva prijímače, referenčný prijímač a rover (užívateľ), kde rover prijíma kalibrovaný signál z referenčného prijímača (pevná základňová stanica).
- Presnosť systému GPS je okolo 15 metrov. Na druhej strane je DGPS presnejšia a môže dosiahnuť presnosť až 10 cm.
- Prístroje GPS pokrývajú široký rozsah a môžu sa používať globálne, zatiaľ čo prístroje DGPS pokrývajú krátky dosah až 100 km, ale tento rozsah sa môže meniť v závislosti od frekvenčného pásma.
- Systém GPS je v porovnaní so systémom DGPS lacnejší.
- Frekvencia signálu vysielaná satelitmi v GPS sa pohybuje medzi 1,1 a 1,5 GHz. Naopak, v DGPS satelity nevysielajú pevný rozsah frekvencie, vysielaná frekvencia závisí od agentúr.
- Faktory, ktoré ovplyvňujú presnosť systému GPS, sú selektívna dostupnosť, satelitné načasovanie, atmosférické podmienky, ionosféra, troposféra a viaccestné. Naproti tomu systém DGPS je ovplyvňovaný vzdialenosťou medzi vysielačom a roverom, ionosférou, troposférou a viaccestou, ale v menšom rozsahu.
- GPS používa systém časových súradníc WGS84, čo je pozemský pozemný systém, zemský stred a geodetický údaj. Na rozdiel od DGPS používa lokálny súradnicový systém.
záver
Systém diferenciálneho globálneho určovania polohy (DGPS) je presnejšia technológia ako jeho predchádzajúci systém globálneho určovania polohy (GPS). Presnosť v DGPS je vylepšená použitím dvoch prijímačov namiesto použitia jedného, ktorý nájde presnú polohu pomocou relatívnych polôh.





